Satellite
Positioning and its Adoption by National Mapping
Introduction
The first use of satellites for establishing relative position on the earth’s surface came with the launch of Echo-1 on 12 August 1960. Complex equipment and analysis was needed and only two points were fixed. Today, just about all mobile items can provide us with our position using the Global Positioning System (GPS).
This paper traces the development of satellite positioning leading up to its use by National Mapping to assist in Australia’s move from a national to an earth centred datum. As the available literature covers the theoretical and historical aspects of positioning by satellite, this paper only provides sufficient detail to establish the theme.
Passive Satellites
A passive
satellite essentially did not do anything other than orbit the Earth and
allow its position to be tracked. The first of these satellites was the Echo-1,
a 30.48 metre diameter balloon of Mylar polyester film. Designed as a
passive communications reflector for transcontinental and intercontinental
telephone, radio, and television signals, it also had 107.9MHz beacon
transmitters for telemetry purposes. Before it re-entered the atmosphere on 24
May 1968, Echo-1 was also used to evaluate the technical feasibility of
satellite triangulation. Simultaneously the satellite was photographed from two
ground stations, against the star background. These photographic images were
then analysed to obtain a geometrical tie between the two stations. Echo-2 was
launched on 25 January 1964 and was lost on 7 June 1969, but was not
used for any geodetic purposes.
PAGEOS (PAssive Geodetic Earth Orbiting Satellite, also Passive GEOS) was the second satellite of the US National Geodetic Satellites Program. Designed to be a highly reflective, 30 metre inflated sphere it also carried no instrumentation. Launched on 24 June 1964 it was used for the Weltnetz der Satellitentriangulation (Worldwide Satellite Triangulation Network) organised by Hellmut Schmid. The worldwide triangulation net was completed using Wild BC-4 ballistic cameras to photograph the PAGEOS satellite against the star background. Because of PAGEOS’s apparent brightness, high orbit and polar inclination, PAGEOS avoided the Earth's shadow. This meant PAGEOS could be observed simultaneously any time of the night from ground stations in places such as Europe, North America and Australia. The program was completed in 1974. The final network connected 46 stations between 2000 and 5000 kilometres apart, on four continents, with an accuracy of better than 20 metres.
Australia's contribution to the PAGEOS project was two, precisely surveyed baselines. An east-west baseline ran between Culgoora (some 20 kilometres west of Narrabri) New South Wales, to Perth, Western Australia; a north-south baseline between Thursday Island, Queensland to Culgoora. Wild BC-4 camera sites were established at the baseline terminals being Thursday Island (BC-4 023), Culgoora (BC-4 060) and Perth (BC-4 032). More detail can be found in Klaus Leppert’s, March 1972 technical report Two Australian Baselines for the PAGEOS World Triangulation.
Active Satellites
The first
successful active spacecraft of the United States National Geodetic Satellite
Program was GEOS-1 (Geodetic Earth Orbiting Satellite). Also called GEOS-A, the
spacecraft was launched on 6 November 1965 and was exclusively designed for
geodetic studies. The instrumentation on GEOS-1 included four optical beacons,
laser reflectors, a radio range transponder, Doppler beacons, and a range rate
transponder. These instruments were designed to operate simultaneously to
fulfil the objective, among others, of locating observation points set at
geodetic control stations in a three dimensional earth
centre of mass coordinate system. Expected accuracy of the final
coordinates was expected to be better than 10 metres.
Between
24 January 1962 and 14 April 1969, ten Geodetic SECOR (SEquential
Collation Of Range) satellites were successfully
launched (there were a couple of failures in this program). While in
operational use for only three years, these satellites were used to established
a global survey network. SECOR proved especially useful to better determine
previously uncertain positions of islands in the Pacific. The SECOR system
consisted of a satellite and 4 ground stations. Three ground stations being at
geographical points where the coordinates were already known, and the fourth at
a location whose coordinates were required. Radio waves were transmitted from
the ground stations to the satellite and returned. The position of the
satellite at any time was fixed by the measured ranges from the 3 known
stations. Using these precisely established satellite positions as a base,
ranges from the satellite to the fourth station were used to compute the
position of that station. Geodetic SECOR operations allowed continents and
islands to be brought onto the same geodetic global network. Each ground
station was entirely portable and comprised 3 units; a radio frequency shelter,
a data handling shelter and a storage shelter. Lighter weight, solid state
equipment was later developed to replace the initial units. Experiments with
SECOR, together with the Navy's Timation
project, provided the technical basis for the GPS NAVSTAR system.
Position
by Doppler or Time
Positioning
today using the Global Positioning System (GPS) also called NAVSTAR (NAVigation Satellite Timing And Ranging) is based on very accurate time.
This accurate time is encoded in every satellite’s broadcast signal. Thus, any
GPS receiver’s time can be synchronized with the satellite’s time so they
generate the same digital code at the same time. When a GPS unit receives a
satellite’s signal, it then just refers to its own internal clock to note the
time. Next it refers to its memory as to the time it had emitted the same
digital code as had just been received from the satellite. The resulting time
difference between the unit’s signal reception time and its memory time, is in
the order of a fifteenth of a second. The distance between the GPS unit and the
satellite is then simply the unit’s calculated time difference multiplied by
the speed of light. Such distance measurements to a minimum of four satellites
are required to compute a three dimensional (latitude,
longitude and altitude) position.
NAVSTAR
was preferred by the US Naval Research Laboratory while the Space and Missile
Systems Organization of the US Air Force favoured the earlier Doppler TRANSIT
system. It was the time measurements of NAVSTAR that allowed more precise determinations
of the satellite’s location and the lengthening of the time between required
satellite position updates, which were seen as advantageous. However, up until
this time Doppler TRANSIT had led the way. Doppler positioning had evolved
right after the then Soviet Union launched Sputnik, the first artificial
satellite to orbit the Earth, on 4 October 1957.
NNSS/NAVSAT/TRANSIT
Following
the 1957 launch of Sputnik, American researchers William H Guier and George C Weiffenbach
established its orbital parameters. For propaganda purposes, the Soviets had Sputnik
broadcast an unbroken tone at 20MHz. From the Doppler shift in the frequency of
that simple signal a complete description of Sputnik’s orbit was
inferred. It was later realised, that if the process was reversed and the
position of the satellite was known, then the position of the ground station
could be found. This capability was just what the Americans were seeking. Such
a capability would enable them to position their submarines so as to launch, if
necessary, the Polaris nuclear missiles they carried. The Navy Navigation
Satellite System (NNSS) program thus commenced in 1958.
The NNSS, later called NAVSAT, program’s first satellite TRANSIT-1A failed after launch on 17 September 1959. TRANSIT-1B, launched on 13 April 1960, was thus the first TRANSIT satellite to achieve orbit and operated for 89 days. A series of TRANSIT satellites followed with varying success; 2A, 2B (never built), 3A, 3B, 4A, 4B, 5A-1, 5A-2, 5A-3, 5C-1. TRANSIT 5BN-2 was launched on 5 December 1963 and became the first operational navigation satellite. It was used regularly by both surface and submarine units of the US Navy until November 1964.
A series of 24 satellites that closely followed the design of TRANSIT 5C-1 were then launched between 1964 and 1988. Called Oscars (Oscar is the phonetic alphabet for the letter O, for operational). While their design contained improvements, there were also problems. After the launch of Oscars 1, 2, 3, 5, and 7 only Oscar 3 failed to reach its orbit. However, the construction of the satellites did not meet specifications, and those that achieved orbit operated only for a few days to a few weeks. Oscars 4, 6, 8, 9, and 10, operated for 7 to 11 months in orbit. Oscar 11 was not used at this time and was later modified and launched as the satellite designated TRANSAT to perform related experiments. Beginning with Oscar 12, the satellites demonstrated an average orbital lifetime of more than 14 years. Two satellites, Oscars 13 and 20, operated for more than 20 years. After Oscars 18 to 32 were built, it became clear that the orbital lifetimes were much longer than anticipated so satellite production ceased. All unlaunched satellites were placed in containers for long term storage.
In 1969, the TRANSIT Improvement Program (TIP) was established. One aim of this program was to have the satellite broadcast ephemerides for 5 days without input from the ground, thereby necessitating the development of a drag free satellite. Three Triad satellites were launched between 1972 and 1976 as part of this program. Three Nova satellites were then built and launched being almost identical to Triad-2 and -3. The NNSS program is summarised in Table 1 below.
|
Table 1 : TRANSIT satellite categories |
|
|
Category |
Details |
|
5
experimental |
TRANSIT-1B, launched 13 April 1960 to TRANSIT-4A, launched 29 June 1961 |
|
10 prototype |
TRANSIT-5A-1, launched 18 December 1962 to TRANSIT-5C-1, launched 4 June 1964 |
|
24
operational |
TRANSIT-O-1, launched 6 October 1964 to TRANSIT-O-25 and TRANSIT-O-31, launched on 25 August 1988 (also known as the Oscar series (O for operational) |
|
3 Triad |
Satellites of the TRANSIT Improvement Program (TIP) : Triad-1 (or TIP-1), launched 2 September 1972, Triad-2 (TIP-2), 11 October 1975, and Triad-3 (TIP-3), 1 September 1976 |
|
3 Nova |
Nova-1 launched 15 May 1981, Nova-3 12 October 1984, and Nova-2 16 June 1988. |
In the late 1980s, a more economical method of launching the remaining Oscar satellites into orbit was sought. Stacked Oscars On Scout (SOOS) was seen as feasible as a single Scout rocket was by now capable of lifting two Oscar satellites into orbit. The first dual satellite or SOOS launch was in 1985. The second was in 1987, with the final launch in 1988. This established the constellation of 12 satellites, with 7 or 8 operational and the remaining satellites stored in orbit.
In addition to the space segment the Doppler TRANSIT system required a ground segment known as TRANET. Please refer to Figure 1 below. By 1984, TRANET (TRAcking NETwork) had grown from some 13 ground stations in 1967 to approximately twenty permanent tracking stations. Of these stations six were operated by the governments of Canada, Australia, Belgium, Italy, and the United Kingdom. Each time a TRANSIT satellite passed within line of sight of a tracking station, it received the transmitted signals, measured the Doppler frequency shift caused by the satellite's motion, and recorded the Doppler frequency as a function of time. The Doppler data were then used to determine each satellite's precise ephemeris (±3 metres) and to project each orbit many hours into the future. This information was then compiled into a navigation message which was provided to the injection stations for upload to the appropriate satellite at next overpass. Each satellite received a new message about every 12 hours, although the memory capacity was 16 hours.
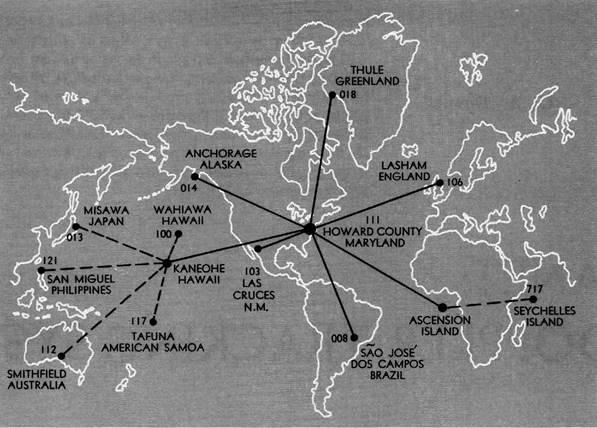
Figure
1 : 1967 TRANET station and communication network.
While developed for the US Navy, NAVSAT/TRANSIT was released for civilian use in July 1967. Utilising signals from a group of five satellites in polar orbits, the satellites transmitted its most recent uploaded orbital parameters and timing data, phase modulated, on two frequencies (400MHz and 150MHz). The use of two frequencies provided a means of eliminating ionospheric refraction from the data. Because of the relative movement of the satellite with respect to the receiver, the satellite’s emitted constant frequency was Doppler shifted upon arrival at the receiver and was thus now a continuously variable frequency. The varying received frequency was compared to a constant reference frequency in the receiver at discrete intervals. This comparison thus provided an indirect measure of the change in the distance between the satellite and receiver over each interval. Doppler measurements consisted simply of cycle counts of beat frequency over precisely timed intervals. The beat frequency being generated by subtracting a constant reference frequency from the variable received frequency. When the position of the satellite was known to sufficient accuracy, such information could be used to determine the location of the receiver. From observations of between 25 to 50 acceptable satellite passes, which could take between 2 to 5 days to acquire, a high level of positional accuracy could be attained.
The Doppler information for both frequencies, together with date, time, satellite number, number of passes, ambient temperature and pressure, were stored by the receiver for later processing. A less accurate position could be determined for the receiver using the broadcast ephemeris stored on each satellite. However, best positional accuracy could only be achieved once the precise satellite’s ephemerides were released. As described above, the broadcast ephemeris was uploaded to and then encoded on the satellite signal itself making it immediately available to all users for all satellites. It was generated from observations made over 36 hour intervals by a network of four US stations. Being derived from such a small tracking net and essentially predictive, its accuracy was considered to be lower than that of the precise ephemeris. The predicted orbit could not accommodate the satellite’s excursions of around 100 metres which occurred frequently. The precise ephemeris however, was derived from sets of observations made over 48 hour intervals by the TRANET. It was thus generally considered to be accurate to within 2 to 3 meters. Unfortunately, the precise ephemeris was only maintained on one, sometimes two, satellites. Further, the precise ephemeris had first to be determined so its broadcast was always delayed. A relatively long occupancy of a station was thus required for the acquisition of a prescribed number of passes. Over time, improvements in hardware, software, and operational procedures resulted in achievable accuracies of 0.5 to 1 metres for point positioning and 15 to 30 centimetres for relative positioning.
Point Positioning required a single receiver being setup at the location whose position was required. Occupation of the station would last until the requisite number of passes were received to obtain a specific level of positional accuracy. Final positional accuracy of 2 to 3 metres using the broadcast ephemeris meant around 100 passes being acquired which in turn would mean some 6 to 8 days on site. A final positional accuracy of around 1 metre, using the precise ephemeris, could be achieved from 30 acceptable passes but this could take 10 to 15 days on site in order to acquire the precise ephemeris data.
Translocation required, as a minimum, two receivers located at different stations and operated simultaneously so that a common set of satellite passes were observed. During data reduction, the received data was edited so that only those portions of the satellite’s orbital arcs that were fully common to the participating stations were used to generate the coordinates. When separations between stations were not large compared with the altitudes of the satellites, the otherwise dominant effects of errors in the ephemerides tended to be nearly the same for each station. As a result, the relative or differential position of stations could be determined to a considerably higher degree of accuracy than their absolute position. Through the exploitation of this fact, an adjustment employing differential positions from all the combinations of stations in a network, an entire geodetic net of high internal accuracy could be constructed.
In the simplest approach to Translocation one receiver remained at a fixed station, usually of known location on a given datum, and a second receiver occupied a station whose coordinates were required. Observations were recorded simultaneously with both instruments recording the same satellite passes. Once the coordinates of both stations were computed the coordinate difference between the known and unknown station would be more accurate than the absolute station coordinates, because systematic errors in orbit parameters were cancelled to a certain degree. If two Doppler receivers were used in pairs, with one receiver positioned over a known control point, the relative positions of unknown point(s) could be determined to submetre accuracy, with data from approximately 25 acceptable satellite passes recorded at each of the unknown points.
Other more complex geodetic techniques, such as Short Arc and Long Arc, were also developed which can be read about in the references.
It should be noted that Russia also developed a Doppler satellite positioning system known as Tsikada. Becoming operational in 1965 the military had access to eight satellites while civilians could only access four. Many of Tsikada’s specifications, including its quoted positional accuracy, were the same as for the American system.
NAVSTAR/GPS
In 1973, the
success and future promise of TRANSIT led the US Department of Defense to initiate design and development work on the NAVigation Satellite Timing And Ranging (NAVSTAR) Global Positioning
System (GPS). The first NAVSTAR satellites were orbited in 1978. These
satellites were used to support testing and development of both the system's
space and ground control segments and receivers for navigation and geodetic
purposes. During the system’s developmental and validation stage, submetre and centimetre level accuracies were consistently
achieved showing its promise. The basic constellation of GPS satellites
was to be 18 but today the constellation consists of some 31 satellites
allowing for satellite breakdown, failure and realignment without loss of user
accuracy.
The NAVSTAR GPS was
developed in 3 phases being :
Phase 1: 1973 - 1979 Concept Validation
Phase 2: 1979 - 1985 Full Development and Tests
Phase 3: 1985 - 1995 Production and Deployment
The first phase
(1973-1979) of the GPS program was intended to confirm the concept of a space based navigation system, demonstrate its potential for
operational utility, and establish the preferred design. The very first NAVSTAR
GPS satellites were actually two refurbished Timation
satellites known as Navigation Technology Satellite (NTS)-1 and -2. These two
satellites carried the first atomic clocks into space.
Development of the
GPS satellites started in the second phase (1979-1985). The satellite generations
were divided into four groups: I, II and IIA, IIR and IIF. The primary
difference in the various satellite generations were accuracy and the maximum
number of days possible without contact from monitoring and control stations.
Please refer to Figure 2 below.
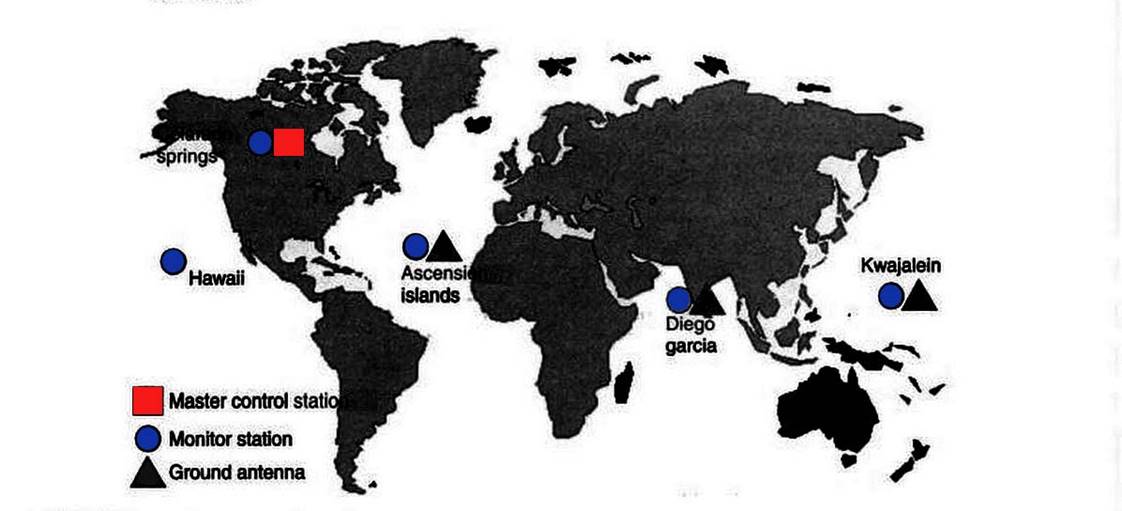
Figure 2 : Map
showing the locations of GPS Control and Monitoring sites. Note that the
Monitoring stations are located near the equator to reduce ionospheric effects.
|
Table 2 : GPS Satellite Summary (at 2016) |
|||
|
Satellite(s) |
|||
|
Generation |
In
Service |
Launched |
Launch Dates |
|
Block I |
0 |
10 plus
1 failure |
1978 - 1985 |
|
Block II |
0 |
9 |
1989 - 1990 |
|
Block IIA |
0 |
19 |
1990 - 1997 |
|
Block IIR |
12 |
12 plus
1 failure |
1997 - 2004 |
|
Block IIR-M |
8 |
8 |
2005 - 2009 |
|
Block IIF |
12 |
12 |
2010 - 2016 |
|
Block IIIA |
0 |
10 (in
preparation) |
2018? |
|
TOTAL |
32 |
70 +10 (in
preparation) |
|
As shown in Table 2 above, the GPS satellite
constellation deployment started with Block I satellites, with the first
launched in 1978. A total of 11 Block I satellites were launched. As concept
validation satellites however, they did not have all of the design features and
capabilities of the production model GPS satellites. The design lifetime of
Block I satellites was 4.5 years but most had an operational life of double
that period.
GPS suffered a
setback due to the Space Shuttle Challenger accident in 1986 and lack of
funding. A 24 month delay resulted before the launch
of the Block II satellites. The first Block II satellite was eventually
launched in February 1989, followed by a further 27 launches of satellites. The
Block II satellites differed from the Block I's in shape and weight and
incorporated design differences that affected security and integrity. Block II
satellites launched after 1989 that had the additional capability of operating
for up to 180 days without contact from the control segment were called Block
IIA satellites. This improvement was significant as earlier Block I and II
satellites required updating from the control segment every 3.5 days. A total
of 28 Block II/IIA satellites were launched but none are now in service. The
design lifetime of Block II/IIA satellites was 7.5 years, but most of the
satellites' lifetimes exceeded that design life.
The launch of the
24th Block II satellite in March, 1994 completed the planned GPS constellation.
In 1995, GPS thus met the requirements for Full Operational Capability (FOC).
Further progress was made on the control and user equipment segments of GPS
during this period.
Block IIR (R for
Replenishment) satellites were backward compatible with Block II/IIA
satellites. Block IIR satellites however, provided enhanced performance over
the previous generation of GPS satellites including the capability to AUTOnomously NAVigate
(AUTONAV) themselves and generate their own navigation message data. AUTONAV
provided the satellites with the capability of operating continuously for at
least 180 days without ground corrections or accuracy degradation. Block IIR
was followed by another system, called Block IIR-M which included a
developmental military use only M code.
In 2016 the last of
the Block IIA satellites was decommissioned and the last of the Block IIF
satellites launched. The Block IIF satellites included an extended design life
of 15 years, faster processors with more memory, and a new civil signal on a
third frequency.
The first of the new
Block IIIA satellites is currently due for launch in 2018. Ten Block IIIA
satellites are already in various stages of production with a total of 32
planned.
In its early years GPS measurements could only be made using
either the carrier phase or the codes. Code measurements or pseudoranges
were based on either the P code or the C/A code. Knowledge of the
characteristics of each of these types of measurements was necessary for
understanding and evaluating GPS survey instrumentation.
Pseudoranges were
simply measurements of distance, and when four satellites were observed
simultaneously, it was possible to determine the timing and three
dimensional position of a ground receiver. In surveying technology, this
is analogous to distance-distance intersection, with the satellites serving as
control stations. To make the most precise measurements, a surveyor must have
two or more receivers simultaneously observing GPS satellites. In this mode of
operation, the carrier phase was measured.
Two kinds of receivers were then built to provide geodetic point
positioning utilising the GPS satellite signals. The receiver manufactured by
Texas Instruments received and processed the signals from the satellite,
computed the distances to a minimum of four satellites, and used resection
formulae to calculate point positions. The relative position of one point to
another was determined within 1 or 2 centimetres in a matter of hours for
points separated by up to 100 kilometres.
Another GPS satellite receiver was the Macrometer
11 Surveyor GPS system, built by the Aero Service Division, Geographical
Company of America. It operated on the principles of radio interferometry to
measure phase differences of the same signal received at two separate
locations. By measuring the projected signal wavelength from several
satellites, it was possible to resolve any ambiguity in the number of
wavelengths and to determine, quite accurately, a three
dimensional space vector between two receivers. In January 1983, the Macrometer showed that the relative position of points up
to 42 kilometres apart could be determined within 5 centimetres within a few
hours. First order accuracy could be attained between stations in closer
proximity.
Since the Macrometer operated on the principle of radio interferometry, it was not necessary to decode the scrambled GPS satellite signal. A private satellite tracking organisation developed the ephemeris necessary to identify the satellites being observed, and the data were processed independently of the US government code. Although the signal was processed offline, future models of the unit were capable of computing geodetic position while still on location.
Once the GPS became operational however, other manufacturers entered the market. Considered as first generation instruments were:
Geoceiver (GEOdetic Doppler ReCEIVER) 702A by Magnavox (USA); and
ITT 5500 by International Telegraph and Telephone
(USA).
Surveying
Satellite Positioning Equipment
Second
generation Doppler
satellite receivers were developed and marketed by Magnavox Corporation, JMR
Instruments Incorporated, Canadian Marconi Company, Decca Navigation Company,
and Motorola Incorporated. The Doppler receiver system components included a
receiver, antenna, data recorder, and power supply unit. The weight of a
typical receiver system was between 25 to 40 kilograms, making it feasible to backpack
the unit to locations inaccessible to vehicles.
Main Doppler receivers of the second generation used
in Australia included :
Magnavox 1502 by Magnavox;
JMR-1 by JMR Instruments Inc.;
Marconi CMA-722B by Marconi (Canada);
costing around $50,000 (1976 Australian Dollars).
Some early receiver models recorded observed data on punched paper
tape. Magnetic tape cassettes were used for data recording and storage in most
later models. Receivers were designed for all weather operation powered by a 12 volt battery. While the units could be left unattended in
an automatic data acquisition mode the loss of one unattended unit by a Natmap field party saw this operational practice quickly
terminated! Antarctica and offshore islands, only accessible by helicopter,
became sites where unattended operation was thought safe.
By 1975, Natmap had four JMR-1 receivers
and by 1984 an additional two Magnavox MX 1502 units.
A third Magnavox unit is believed to have been purchased later. Please refer to
Figure 3 below.


Figure
3 : JMR-1 (left) and Magnavox MX 1502 (right) Doppler
satellite receivers.
In 1996, the NAVSAT/TRANSIT system was switched off.
The United States placed security limitations on the available accuracy of GPS
positions which in turn created a great range of complexity in GPS satellite
surveying equipment. The simplest sets received only the carrier signal and
were unable to decode the satellite passes. These codeless receivers included
the Macrometer V1000. When the security limitations
were lifted in May 2000, the United States committed to providing a worst
case pseudorange accuracy of 7.8 meters at a 95%
confidence level (note that this is not an indicator of a GPS unit’s accuracy
as pseudorange is the distance from a GPS satellite
to a receiver). Portable GPS receivers for precise surveying applications
became available from DTAC Incorporated, Litton Aero Service, Texas Instruments
Incorporated, Trimble Navigation, WM Satellite Survey Company, and others. From
these early surveying systems came today’s range of GPS devices.

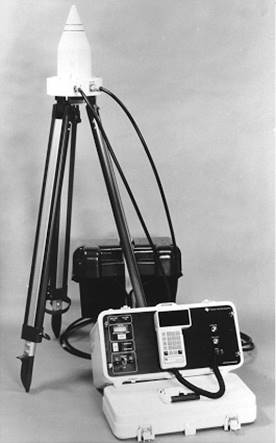
Figure
4 : Geographical Company of America Macrometer V1000 (left) and Texas Instruments
TI 4100 GPS Navigator (right).
GPS
Surveying
A GPS
receiver measures the incoming phase of the satellite signals to millimetre
precision. As the satellite signals propagate through space to earth however,
they pass through and are affected by the ionosphere and troposphere, degrading
the accuracy of the final observation.
Nevertheless, Static GPS surveying or single point positioning has been used on primary control surveys. Provided the GPS receiver could be guaranteed to be motionless for a relatively long period, in the order of days, measure to a minimum of 4 satellites simultaneously and the data were post processed, accuracies of a few centimetres could be achieved. This level of accuracy was commensurate with that available from differenced measurements. Point Positioning can be achieved without the user establishing control stations or using corrections directly from continuously operating reference stations as discussed below.
For surveying purposes, most GPS practices adopt the idea of differential positioning. Simplistically, a GPS receiver is set up at a station whose position is known exactly, a base station. This base station receiver's computer can calculate its position from satellite data, compare that position with its actual known position, and find the difference or error correction. Meanwhile, one or more GPS receivers are transported to the points whose positions are required. It is crucial that the base station operates continuously while the roving GPS receivers are being used. The positions obtained from the roving GPS are then corrected by applying the error found at the base station.
In Real Time Kinematic (RTK) surveying the errors are
applied in real time. This can be done by a radio or mobile (cell) phone link
between base station and the roving receiver(s). Today however, RTK systems
have the radio transmitter/receiver built into the appropriate unit.
Differential Global Positioning System (DGPS) used a network of
fixed, ground based reference stations to broadcast
the difference between their positions as indicated by the GPS satellite system
and their known fixed positions. These stations broadcast their differences
between the measured satellite pseudoranges and
actual (internally computed) pseudoranges, and the
receiver stations then corrected their pseudoranges
by the same amount. Users could be up to 200 nautical miles (370 km) from a
reference station, however, the accuracy of DGPS positions decreases with
distance from the reference station.
Australia has three DGPS systems. One system is mainly for marine
navigation, broadcasting its signal on the longwave band; another is used for
land surveys and land navigation, and has corrections broadcast on the
commercial FM radio band; the third is at Sydney airport for the precision
landing of aircraft where corrections to aircraft position are broadcast via the
aviation VHF band.
Utilization of the DGPS technique requires a minimum of 4
satellites for three dimensional positioning. RTK
requires at least 5 satellites to insure against losing the signal of one
satellite and adds considerable strength to the results. Both methods rely on
real time communication between the base station and roving receivers, but RTK
base station corrections are generally more complex than those required in DGPS.
To eliminate the overhead and limitations associated with
establishing RTK base stations without loss of its centimetre order of accuracy
in real time, services have arisen around the world to provide Real Time
Correction Messages (RTCM). Governments and commercial interests have
implemented Real Time Networks (RTN) to generate and broadcast RTCM. GPS users
can then, not necessarily freely, access the RTCM broadcast over a suitable
data link. These services obtain their corrections from their RTN of
Continuously Operating Reference Stations (CORS).
The central idea underlying RTN differential corrections is that the combination of observations from several CORS at known positions are used to derive a model of an entire region. So rather than being considered as isolated beacons with each covering its own segregated area the CORS are united into a network. The data from the network can then be used to produce a virtual model of the area of interest. From this model, distance dependent biases such as ionospheric, tropospheric, and orbit errors can be calculated. Once the roving GPS receiver’s place within that network is established it is possible to predict the errors at that receiver’s position with a high degree of certainty. Not only can the CORS network be used to model errors in a region more correctly, but the multibase solution provides redundancy.
Several CORS networks already exist in Australia being :
|
Network |
Operator |
|
CORSnet |
a New South Wales government network currently consisting of 47 sites. |
|
GPSnet |
a Victorian government network of over 100 sites throughout the state. |
|
SunPOZ |
a Queensland government network of currently less than 10 sites. |
|
Landgate CORS |
a Western Australian government network of currently more than 10 sites. |
|
TopNET |
a joint venture between Topcon and Position Partners; mainly operating in Queensland from Brisbane to Mackay, but also has 4 stations in Victoria servicing greater Melbourne and one station in Rydalmere, NSW. |
|
SmartNet Aus |
a joint initiative of Leica Geosystems and CR Kennedy with 128 sites Australia wide. |
|
AuScope Geospatial |
an initiative of Geoscience Australia in collaboration with the Australian National University, University of Tasmania, Curtin University and all of the State and Territory Governments; concerned with the deformation of the Australian continent; providing the foundation for the new National Datum; and allowing access to the fundamental national geospatial reference frame to support standard high accuracy GNSS positioning applications. |
Satellite
Positioning by Natmap
An early user of positioning by satellite was Natmap’s Bathymetric program. Not only for accurately locating the sounding lines up to 300 kilometres offshore but for fixing a number of offshore islands and features. Strengthening horizontal topographic map control and later map accuracy checks also made use of this technology.
Natmap’s four JMR-1 receivers were primarily used for point positioning in the primary control network. From 1975 to 1977, Natmap along with the Army and State Survey Authorities carried out a Doppler satellite survey of junction points of the Australian Geodetic Survey and of other stations on Australian territory. Please refer to Figure 5 below.
The purpose of this
survey was essentially to test the accuracy of the 1966 Australian Geodetic
Datum (AGD66). The survey did however, also provide parameters to users of the
NNSS/NAVSAT/TRANSIT system in Australia to transform satellite derived
coordinates to the AGD and AHD; and vice versa, transform coordinates on the
AGD and AHD to the geocentric world datum of the NNSS system, WGS72, and that
of the US Defense Mapping Agency, NWL9D.
Most of the observations were obtained with JMR-1
Doppler satellite survey sets of which up to four were in use at the same time.
Seven stations were observed with Magnavox Geoceivers
and five with a Marconi CMA 722B.
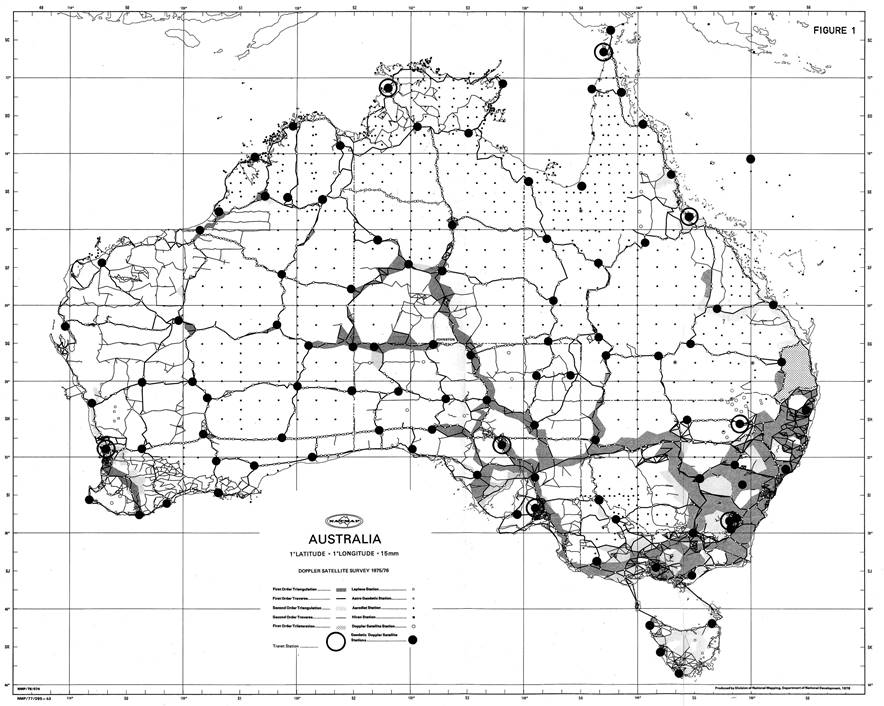
Figure
5 : Map showing the location of points, mainly on the
primary control network, occupied during the 1975-77 Doppler satellite survey.
While this satellite based
survey did not result in any change to the existing Australian datum it did
show that the then geocentric world datum WGS72 provided a better fit to the
AGD than NWL9D. Please refer to Table 3 below (Leppert,
1978).
|
Table 3 : Australian baseline chord distance comparison (metres) |
||||
|
Sites |
Measured |
AGD66 |
WGS72 |
NWL9D |
|
Culgoora (BC-4 060) - Perth
(BC-4 032) |
3,163, 618.22 |
616.37 |
619.29 |
621.90 |
|
Culgoora (BC-4 060) – Thursday
Island (BC-4 023) |
2,300, 211.83 |
207.52 |
212.29 |
214.18 |
Using additional data and improved adjustment
techniques AGD84 was produced but meant that there was no systematic
transformation between the coordinates of AGD84 and AGD66. Figure 6 below is a
map showing the location of points occupied with Doppler
satellite receivers to 1986, producing coordinates to the highest accuracy
standard.
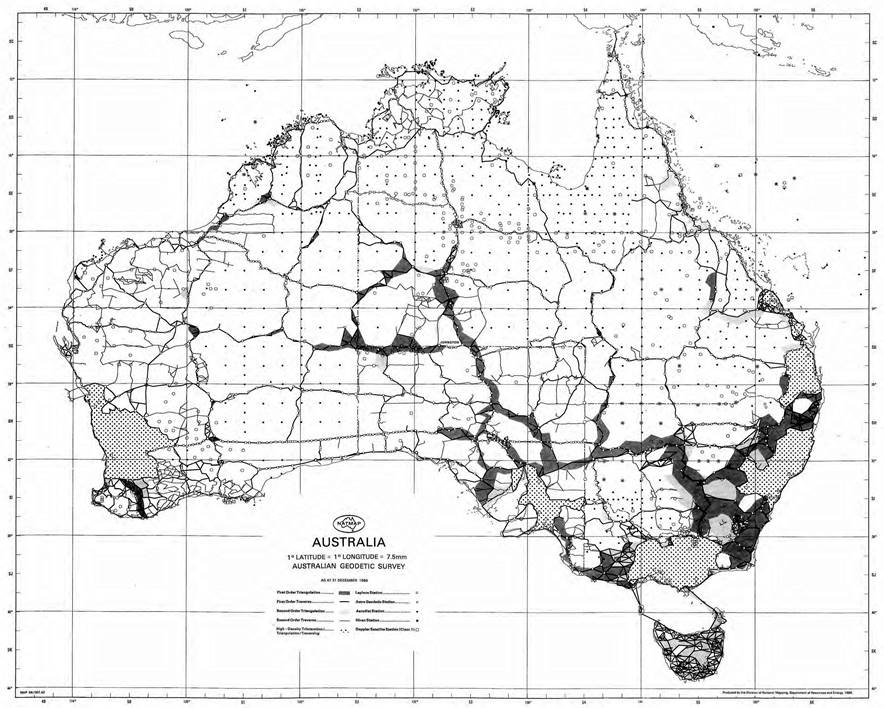
Figure
6 : Map showing the location of points occupied with Doppler satellite receivers to 1986,
producing coordinates to the highest accuracy standard.
With the 1988 decision for Australia to adopt
a geocentric datum by 1 January 2000 a series of permanent GPS stations
extending from Antarctica to Cocos Island, were established as part of the
world wide International GPS Service (IGS) campaign. Continuous GPS
observations were undertaken at eight geologically stable marks which formed
the Australian Fiducial Network (AFN). During the IGS campaign GPS observations
were also carried out at a number of existing geodetic survey stations across
Australia. These were supplemented by further observations in 1993 and 1994,
producing a network of about 70 well determined GPS sites, controlled by the
AFN, with a nominal 500 kilometre spacing across Australia. These sites were collectively
known as the Australian National Network (ANN). By this time Natmap had ceased to exist and this work was carried
forward by its successor. Given the time that has now passed since the 2000
datum was established a new 2020 datum is now clearly on the horizon.
Satellite Positioning Constellations
America : GPS
In December 2016 there were 31 healthy United
States GPS satellites. Between 6 and 13 satellites are usable on a daily basis.
However, local blockage and interference can reduce this to fewer than 4
satellites for individual users, which is not sufficient for a position
calculation using a single system.
China : BeiDou
The Chinese BeiDou
navigation system currently has a constellation of 14 operational satellites.
Five of the constellation are geostationary satellites (GEOs) situated above
the equator covering China. Five more satellites are inclined geosynchronous
satellites (IGSOs) and the remaining four satellites are medium Earth orbit
(MEO) satellites. The MEO satellites rotate around the Earth 13 times in one
week. In East Asia and Australia, between six and 14 BeiDou
satellites are always visible.
Europe : GALILEO
Up to December 2016, 18 Galileo satellites had been
launched with 11 now available for positioning. Satellites E14 and E18 are in
an elliptic orbit and could be used in the future. There are between two and
seven Galileo satellites in view at any one time. A Galileo-only position is
possible anywhere in the world for 60% of the time. On 17 November 2016, four
extra satellites were launched; two are planned to become available in April
2017 and the other two in June 2017.
India : NAVIC
The Indian Regional Navigational Satellite System (IRNSS) was a regional satellite navigation system owned by the Indian government. In April 2016, after the launch of the constellation's last satellite, IRNSS was renamed Navigation Indian Constellation (NAVIC). (NAVIC means sailor or navigator in Sanskrit, Hindi and many other Indian languages, and also stands for NAVigation with Indian Constellation).
The NAVIC constellation consists of a total of seven satellites; 3 in geostationary orbit (GEOs) and 4 satellites in geosynchronous orbit (GSO). The first satellite IRNSS-1A) of the proposed constellation was successfully launched on the 1st of July 2013 as one of the three geosynchronous satellites. IRNSS-1B was also placed in geosynchronous orbit on 4 April 2014. IRNSS-1C was the first of the geostationary satellites launched on 16 October 2014, while IRNSS-1D. launched 28 March 2015, was the last of the three geosynchronous satellites. The final three geostationary satellites, IRNSS-1E. -1F and -1G were launched on 20 January 2016, 10 March 2016 and 28 April 2016, respectively.
NAVIC became operational in late 2016, and is currently only
planned to be available to an area of about 1500 kilometres around India.
Japan : QZSS or Juntencho
The
Japanese Quasi-Zenith Satellite System (QZSS) or Juntencho
is aimed to provide, mainly users in Japan, with access to more satellites
for precise positioning purposes. Because of the geographical relationship of
Japan and Australia however, QZS reception and testing is being conducted in
Australia.
The first
Quasi-Zenith Satellite (QZS-1) was launched on 11 September, 2010. In September
2011 the Japanese government committed to the establishment of a four-QZS
constellation and complete a seven-QZS constellation in the future. Three QZ
satellites will be placed in periodic Highly Elliptical Orbit (HEO) and a
fourth in a geo-stationary orbit. The satellites in HEO will all pass over the
same groundtrack. QZSS is designed so that at least
one satellite of the three HEO satellites will be at its zenith over Japan; hence
the term quasi-zenith.
It is now planned that QZSS will become a four-satellite
constellation from 2018. Together with American GPS satellite coverage, a total
of eight or more positioning satellites will then cover most of Japan's
territory. The three remaining QZ satellites will be launched post 2018 to
create the planned seven-QZS constellation.
Russia : GLONASS
Currently 24 Russian GLONASS satellites are available,
with two additional test satellites. Between four and ten GLONASS satellites
are visible for users anywhere in the world at any one time.
Satellite
Based Augmentation System (SBAS)
A
Satellite Based Augmentation System utilises space based and ground
based infrastructure to improve the accuracy, integrity and availability
of basic Global Navigation Satellite System signals. Essentially, the
satellite’s positioning data is acquired by two or more ground receivers and
relayed to a processing centre. The processing centre determines corrections to
the data and relays the corrections to a geostationary satellite. The user’s
system may then acquire not only the positional data but also the necessary
corrections and thus provide a position to the user accurate to around 10
centimetres. Please refer to Figure 7 below. Users requiring such an accuracy
come from agriculture, livestock monitoring, resource extraction, air, rail and
road transport, maritime, construction, utility services and spatial data
specialists.
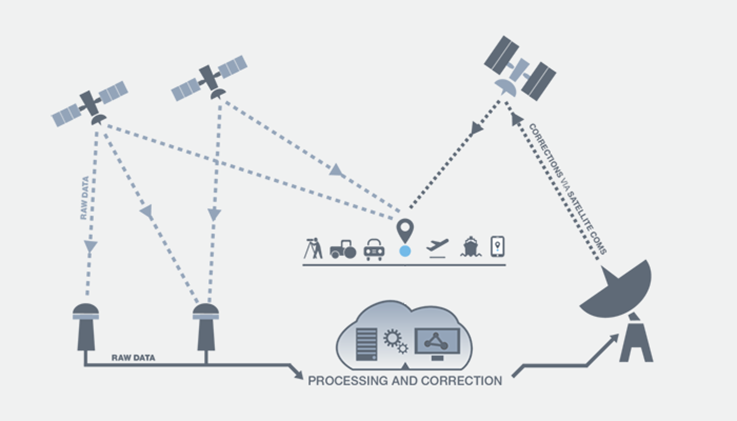
Figure
7 : Diagram showing the SBAS concept
SBAS
already operates in a number of regions as listed in Table 4 below (not
including military systems) :
|
Table 4 : Satellite Based Augmentation System (SBAS) |
||
|
Region |
Name |
Description |
|
United
States |
WAAS |
The Wide Area Augmentation System is an air navigation aid developed by the US Federal Aviation Administration intended to enable aircraft to rely on GPS for all phases of flight, including precision approaches to any airport within its coverage area; it may be further enhanced with the Local Area Augmentation System (LAAS) in critical areas. |
|
European
Commission |
EGNOS |
The European Geostationary Navigation Overlay Service was developed by the European Space Agency and EUROCONTROL consisting of a network of about 40 ground stations and 3 geostationary satellites with the main use of the system for aviation. |
|
Japan |
MSAS |
The Multifunctional Satellite Augmentation System operated by Japan's Ministry of Land, Infrastructure and Transport Japan Civil Aviation Bureau (JCAB). |
|
India |
GAGAN |
The GPS Aided Geo Augmented Navigation system. |
|
Russia |
SDCM |
System for Differential Correction and Monitoring. |
|
Where
commercially available |
StarFire Starfix & OmniSTAR |
Operated
by John Deere and C-Nav Positioning Solutions
(Oceaneering); and Operated by Fugro. |
November
2017 saw the launch of the industry trial of an Australian regional SBAS. The two year trial is being funded with $12 million from the Australian Government and a further $2 million from the New Zealand
Government. It is being managed by Geoscience Australia (GA) and Land
Information New Zealand (LINZ), in partnership with the global technology
companies GMV, Inmarsat and Lockheed Martin. The Australia and New Zealand CRC
for Spatial Information (CRCSI) is managing the industry projects which will
demonstrate the benefits and applications of improved positioning capability.
Ten industry sectors will test three new satellite positioning technologies,
including the world first second generation SBAS and Precise Point Positioning.
An Australian regional SBAS is seen as a means of overcoming the current gaps in mobile and radio
communications and, when combined with on the ground operational infrastructure
and services, will ensure that accurate positioning information can be received
anytime and anywhere within Australia and New Zealand. The components of the
initial testing SBAS include; an L-Band satellite transmitter operated by
Inmarsat; operation of a satellite uplink capability at Uralla NSW by Lockheed
Martin; positioning correction services operated by GMV and Geoscience
Australia; development and execution of a testing program, delivered in
partnership by Geoscience Australia and the CRCSI and LINZ in New Zealand.
Closing
Remarks
For world-wide precision positioning, the American GPS
alone does not always provide sufficient GPS coverage. This is due to the GPS
constellation periodically having unhealthy satellites. Adding in
GLONASS coverage significantly improves satellite availability. Satellite
availability is also improved by adding in the BeiDou
constellation. Accuracy however, is reduced due to the BeiDou
GEO and IGSO satellites distance from the Earth. Thus, even with a total of 80
(31 GPS, 24 GLONASS, 14 BeiDou and 11 Galileo)
satellites today, no single constellation allows consistent positioning
for the user.
By 2020, when all constellations are planned to be
fully established, there will be 121 satellites (32 GPS, 24 GLONASS, 30 Galileo
and 35 BeiDou). It would seem that then no matter where we go with satellite
positioning development and/or integration, we can be sure we will know where
we have ended up. When however, the additional accuracy provided by SBAS is
factored in, not only will we know where we have ended up but that that
position is accurate to within the dimensions of own footprint!
Compiled by Paul Wise,
2017-2018
Sources
Anonymous (circa 1980), Operating Instructions MAGNAVOX MX1502 Satellite Surveyor, National Mapping internal document.
Anonymous (circa 1980), Options for More Effective Navigation and Position Fixing, National Mapping internal document.
Australian Academy of Science (1987), Geodesy in Australia, National Report for 1983-87, prepared by the Geodesy Sub-Committee, National Committee for Solid Earth Sciences, International Union of Geodesy and Geophysics, Vancouver.
Brinker, Russell and Minnick, Roy (Eds.)(1987), The Surveying Handbook, Van Nostrand Reinhold Company Inc., accessed at : https://books.google.com.au/books?id=wbHbBwAAQBAJ&pg=PA17&lpg=PA17&dq=brinker+and+minnick+surveying+handbook&source=bl&ots=JPYo7mMmYu&sig=lHz2lHW655tlPtyhS8YdqfIJ5Ew&hl=en&sa=X&ved=0ahUKEwi7xLvpxYXKAhVGIKYKHdz4AXAQ6AEILTAD#v=onepage&q=brinker%20and%20minnick%20surveying%20handbook&f=false
Danchik, Robert J (1998), An Overview of TRANSIT Development, accessed at : http://techdigest.jhuapl.edu/td/td1901/danchik.pdf
Dunnell, CA (1967), TRANET Doppler Tracking System, accessed at : http://www.jhuapl.edu/techdigest/views/pdfs/V06_N4_1967/V6_N4_1967_Dunnell.pdf
Ford, Reginald Arthur (1979), The Division of National Mapping’s Part in the Geodetic Survey of Australia, The Australian Surveyor, June, September and December 1979: Vol.29, No.6, pp.375-427; Vol.29, No.7, pp.465-536; Volume29, No.8, pp.581-638, ISSN 00050326, published by the Institution of Surveyors, Australia. This work is accessible via this link
Intergovernmental Committee on Surveying and Mapping (2016), GDA Modernisation Implementation Working Group : Datum Modernisation Update December 2016, accessed at : http://www.icsm.gov.au/gda2020/gmiwg.html
JMR Instruments, Inc. (1976), The JMR-1 Doppler Survey Set : Description and Application, Document no. JMR 73288-2.
Leick, Alfred; Rapoport, Lev and Tatarnikov, Dmitry (2015), GPS Satellite Surveying, 4th Edn., John Wiley & Sons Inc., accessed at : https://books.google.com.au/books/about/GPS_Satellite_Surveying.html?id=4qE6xYjYSHgC&redir_esc=y
Leppert, Klaus (1972), Two Australian Baselines for the PAGEOS World Triangulation, National Mapping Technical Report No.11.
Leppert, Klaus (1978), The Australian Doppler Satellite Survey 1975-1977, National Mapping Technical Report No.21.
McCarthy, R (1978), Satellite Surveying, First Survey Congress, Kalgoorlie, May 1978.
Nichols, Robert H (1974), Geodetic SECOR Satellite, Defense Technical Information Center, AD/A-002 625, accessed at : http://www.dtic.mil/dtic/tr/fulltext/u2/a002625.pdf
Stansell, Thomas A (1971), The Navigation Satellite System, Navigation, Vol.18, pp.93-109.
Stansell, Thomas A (1978), The TRANSIT Navigation Satellite System, Navigation, MAGNAVOX Government and Industrial Electronics Company, R-5933A.
Rao, GS (2010), Global Navigation Satellite Systems, McGraw-Hill, accessed at : https://books.google.com.au/books/about/GLOBAL_NAVIGATION_SATELLITE_SYSTEMS.html?id=WpiHre7LPDEC&redir_esc=y
Rueger, Jean Marc (1990), Electronic Distance Measurement, Springer-Verlag Berlin, Heidelberg, ISBN 978-3-540-51523-4.
Seppelin, TO (1974), The Department of Defense World Geodetic System 1972, Proceedings of the International Symposium on Problems Related to the Redefinition of North American Networks, Fredericton, New Brunswick, Canada, May.
Torge, Wolfgang (1980), Geodesy, Walter DeGruyter, Berlin.