Nat Map’s First Use of Automated Photogrammetry –
the Wild, Model IV, B8 Stereomat
In the mid-1960s, following from the Commonwealth government’s earlier approval of a national 1:100,000 scale topographic mapping program, National Mapping had implemented or was about to implement the best technology available for primary data acquisition. However, the next stage of extracting the information from the aerial photographs was still a time consuming process despite the use of a panel of private contractors.
To extract the information necessary for a topographic map the overlapping 1:80,000 scale aerial photographs were placed in a stereoplotter. This arrangement provided the operator with a three dimensional view of the area or stereoscopic model. Refer Figure 1. Previously acquired horizontal and vertical control was then used to orient and scale the stereoscopic model. Thus the map information extracted from the model was located correctly and at the required map scale. The three dimensional view provided to the operator in the plotter also allowed the terrain to be represented by tracing its contours at 20 metre intervals. Nat Map’s standard manual stereoplotter was the Wild B8 Aviograph and its operation is covered by this manual and additional notes. Further detail on manual stereoplotting for mapping is provided in Dave Hocking’s 1998 paper Natmap Early Days, Map Compilation from Aerial Photographs 1948 ‑1970s.
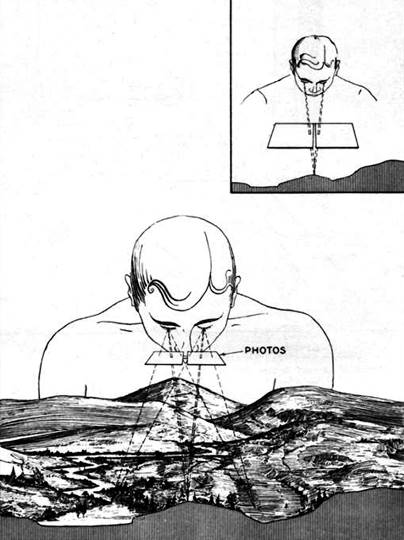
Figure 1 : Operator viewing overlapping aerial photographs to obtain a three dimensional view of the area or stereoscopic model.
With advances in electronics it was foreseen that a rapid mapping solution might lie in the form of orthophotomaps. An orthophotograph is an aerial photograph that has all the terrain, earth and camera related distortions removed and therefore all the features in the photograph are now truly positioned at scale. Put together as a mosaic these corrected photographs form an orthophotomap. The orthophotomap would have the accuracy of the traditional topographic map but would be faster to produce.
The Wild, model IV, B8 Stereomat emerged from the combined expertise of Wild Switzerland (optics) and Raytheon USA (electronics) and for the first time automated much of the manual stereoplotting operations. After the two aerial photographs, forming the stereoscopic model, were oriented in the Stereomat a small area was continuously auto-correlated as the machine scanned successive strips across the model. The auto-correlated areas, actually small orthophoto segments, were imaged onto photographic film and contours at whatever predetermined interval could be added or recorded as separate digital data. Refer Figures 2, 3 and 4. Once scanning commenced the operator was superfluous, theoretically, until for whatever reason auto-correlation was lost and the operator was required to establish it again for the machine! In Nat Map, however, these machines generally had an operator constantly monitoring the scanning process to reduce the instances of loss of auto-correlation. Height data was continuously collected during the scanning of the photogrammetric model and recorded on magnetic tape. These data tapes were later computer processed to generate contours which were output on an automatic data plotting table. Greater detail on Nat Map’s use of automated photogrammetry can be found in Rod Menzies and Paul Wise’s 2011 paper The 1:100,000 Scale Topographic Mapping Program – Assisted by Technology.
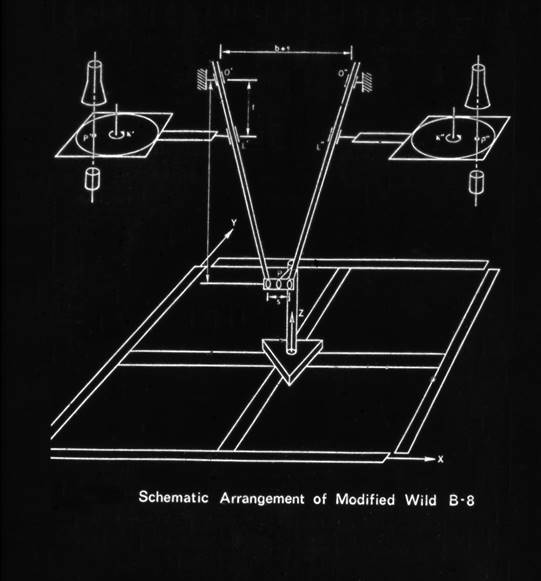
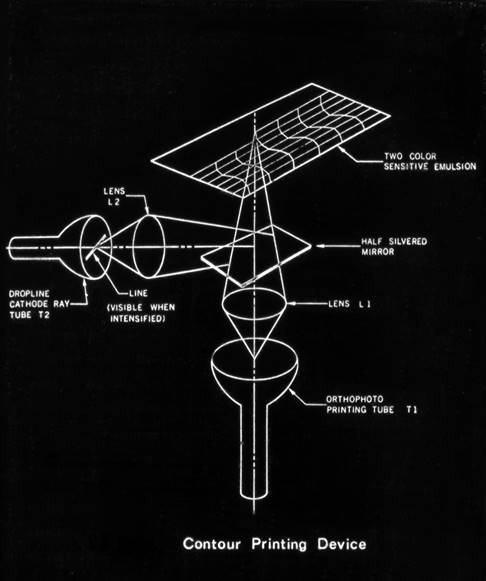
Figures 2 and 3 : Wild Model IV B8 Stereomat schematics.
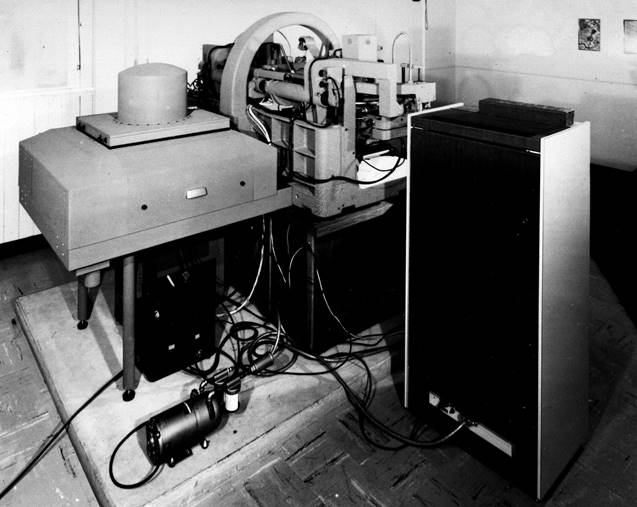
Figure 4 : Wild, Model IV, B8 Stereomat from rear showing photographic film printing frame.
The development of automated photogrammetry is described in this paper, Automation in Photogrammetry, by Gottfried Konecny. Konecny delivered his paper to a gathering of senior state and federal mapping personnel in Australia in 1967. The discussion summarised at the end of the paper is also of interest as it provides an insight into National Mapping’s intended use of the model IV Stereomat and its costs.
This paper, Evaluation of Stereomat IV (Automatic Stereoplotter), also from 1967 and originally prepared by Charles H Lawrence of the United States Army Map Service, described their experience with the model IV Stereomat.
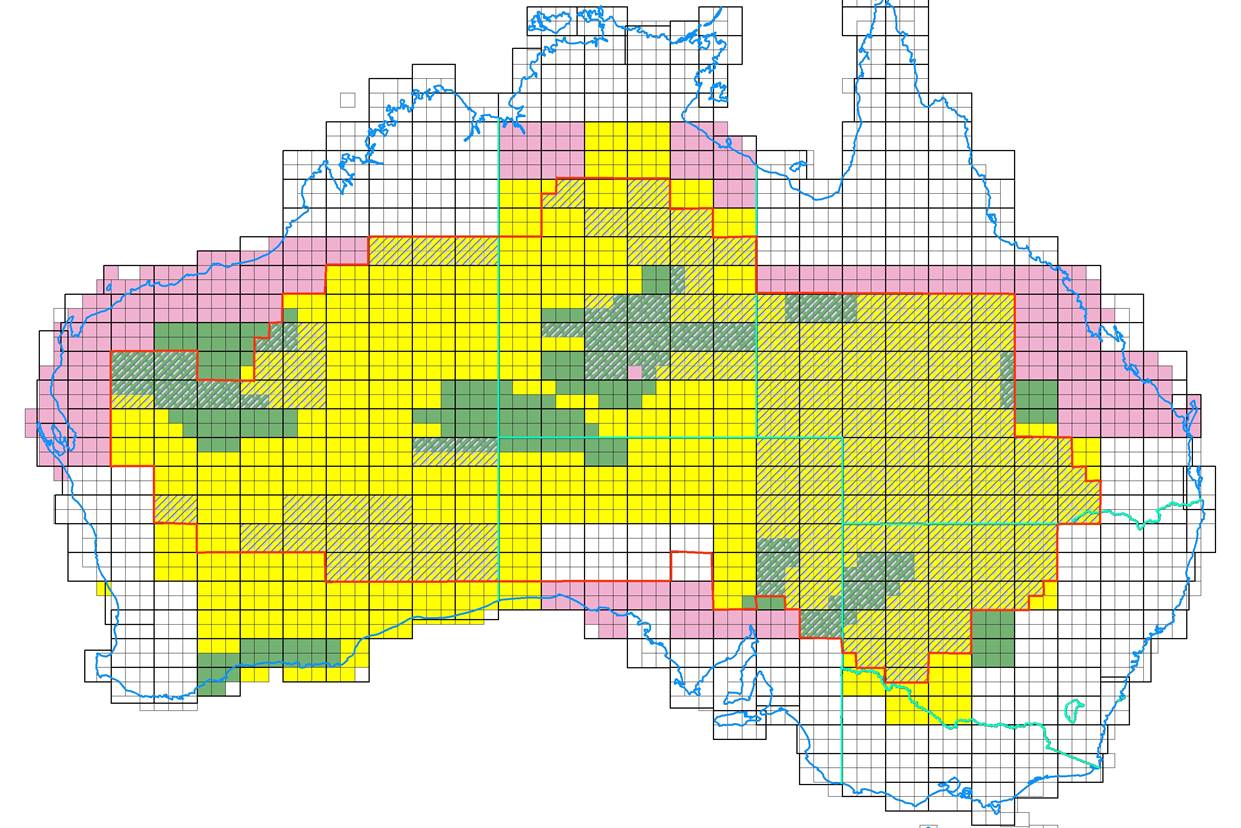
Figure 5 : Diagram indicating the method of compilation for each 1:100,000 scale map sheet area in Nat Map’s area of responsibility. Pink coloured areas would be compiled conventionally, yellow coloured areas would be compiled by differential or simple rectification, and green colured areas would be compiled by automated stereoplotter. The shaded areas indicate where 1:100,000 scale orthophotomaps were produced.
Around mid-1968 the basis for the diagram shown in Figure 5 emerged. Due to resource limitations it had been decided, in consultation with the National Mapping Council, that 1:100,000 scale map sheets within the area enclosed by the red line would be compiled at 1:100,000 scale, but only published at 1:250,000 scale. As much of this region was relatively flat, orthophotomaps would reduce compilation time. Further analysis showed that areas in which terrain slopes were less than 5 degrees could be compiled by less rigorous means without loss of positional accuracy. Where there was little relief, simple whole-image rectification using a Zeiss Oberkochen SEG V rectifier would be used and in areas of random relief two Zeiss Jena Topocarts would be employed. The Topocart was a semi-automated machine which allowed greater scan widths than the Stereomat. In open country the operator could also increase the speed of travel of the scanner thus further reducing production time.
By the early 1970s Nat Map had three Wild, model IV, B8 Stereomats in production. These machines were given the areas of steepest and most complex terrain producing an acceptable product in scale and accuracy. The first orthophotomaps from Nat Map were released in 1972. Orthophotomap annual production is shown in Figure 6. Information on orthophotomap production and location had to be extracted from a number of source documents including annual Statements of Activity. While the total number of orthophotomaps produced is considered a reliable figure, the other statistics should be regarded as indicative only.
|
Year |
Completed |
|
1968 |
2 |
|
1969 |
13 |
|
1970 |
12 |
|
1971 |
20 |
|
1972 |
50 |
|
1973 |
152 |
|
1974 |
86 |
|
1975 |
91 |
|
1976 |
72 |
|
1977 |
167 |
|
1978 |
118 |
|
Total |
783 |
Figure 6 : Table showing annual Orthophotomap production.
Nat Map had received its first Stereomat in January 1968 with a second machine following in 1969. The two Topocarts had arrived in 1970 along with a third Stereomat. The long lead time between machine delivery and product release was due to many factors not the least being the newness of the technology and Australia’s distance from manufacturer support. However, once underway, the production rate of about one hundred 1:100,000 scale orthophotomaps per year was impressive. In addition, initial orthophotomaps were produced at 1:80,000 scale or photo-scale, and some second edition photomaps were feature-enhanced. At the time of writing the number of such products was unable to be determined as was their inclusion or otherwise in the above figures. For simplicity, these products were considered NOT to be included in the above statistics.
While automated map production met the output criteria it failed to meet mainstream user requirements. Specialists in the fields of natural resource assessment, environmental study, urban and regional planning, and engineering and scientific investigations, who were used to looking at aerial photos had no difficulty with the orthophotomaps, but to the rest of the community the grey-scale images were too difficult to comprehend. Due largely to the use of the 1:80,000 scale monochrome mapping photography, this photography of Australia’s low contrast terrain pushed the Stereomat’s optical capabilities such that the resolution of the photographic background was not optimum. Additionally, the orthophotomap had to be reproduced photographically and so was not available off-the-shelf adding to its cost and lack of acceptance.
By 1975, computer based digital mapping was on the horizon along with a shift of office accommodation for the Melbourne office. This shift occurred in early 1977 and saw the end of the orthophotomapping program and a new focus on digital mapping.
Sources
Division of National Mapping (1971-79), Statement of Activities for period 1971-1979, prepared by the Division of National Mapping, Department of National Resources, Canberra.
Hutchins, RW (1959), Electronic Correlation of Image Detail in the Stereo Model, National Mapping Bulletin by the National Mapping Council, No.13, April 1959.
Konecny, Gottfried (1967), Automation in Photogrammetry, Report on Colloquium Control for Mapping by Geodetic and Photogrammetric Methods (Ed. P. V. Angus-Leppan) held at the University of New South Wales, 22-24 May, 1967, pp. 96-122, accessed at : http://www.gmat.unsw.edu.au/about/school_pubs/pdfmono/mono00.pdf
Lines, John D (1992), Australia on Paper – The Story of Australian Mapping, Fortune Publications, Box Hill.
Menzies, Rod W and Wise, Paul J (2011), The 1:100,000 Scale Topographic Mapping Program – Assisted by Technology, 100 Years of National Topographic Mapping Conference, Canberra 2011, Paper 7 from CD-ROM and available via this link.
United States of America (1967), Evaluation of Stereomat IV (Automatic Stereoplotter), Proceedings, Fifth United Nations Regional Cartographic Conference for Asia and the Far East (E/CONF 52/5), Canberra, March 1967, pp. 213-218, accessed at : http://unstats.un.org/unsd/geoinfo/RCC/docs/rccap5/5th_UNRCCAP_econf.52_5.pdf
by
Paul Wise, April 2015